在 docker 上安装 ROS1/2
前言
ROS 官方严格限制了各 ROS 版本与操作系统间的对应关系。如 ROS1 Melodic 就对应 Ubuntu 18.04 LTS。跨版本的安装是不被支持的,你无法在 apt 中找到对应的预编译二进制软件包。(当然你依然可以尝试从 github 克隆代码并手动编译。)
但是依靠 docker,我们可以实现任意版本的 ROS 安装并且使用其附带的 GUI 工具。如 rqt, gazebo, rqt 等。
实现
安装前检查
本教程适用于 Linux 系统如 Ubuntu,仅仅为了在不改变系统版本的情况下安装不同版本的 ROS。
本方法对于 GUI 软件仅适用于使用 Xorg(X11) 的窗口系统,如你使用 Wayland 或者除 Linux 以外的系统,请自行配置 X11 服务。
docker 安装
首先安装 docker,过程不多复述。移步至官网教程以进行安装。
安装完后,可以在终端输入 docker -v 来检查,正常情况如图所示。

docker 后配置
你可能会发现安装后无法执行 docker ps 等命令。
尝试执行 sudo usermod -aG docker $USER 以添加当前用户至 docker 用户组。
重启后生效。
拉取 docker 镜像
在终端执行:
docker pull fishros2/ros:melodic-desktop-full这里默认拉取 ROS1 Melodic 版本,若需要其他版本则可以使用:
在以上源中找到你所需要版本的特定tag即可。
拉取过程中可能会有网络问题,请多次尝试,必要时可以使用代理。
创建 docker 镜像
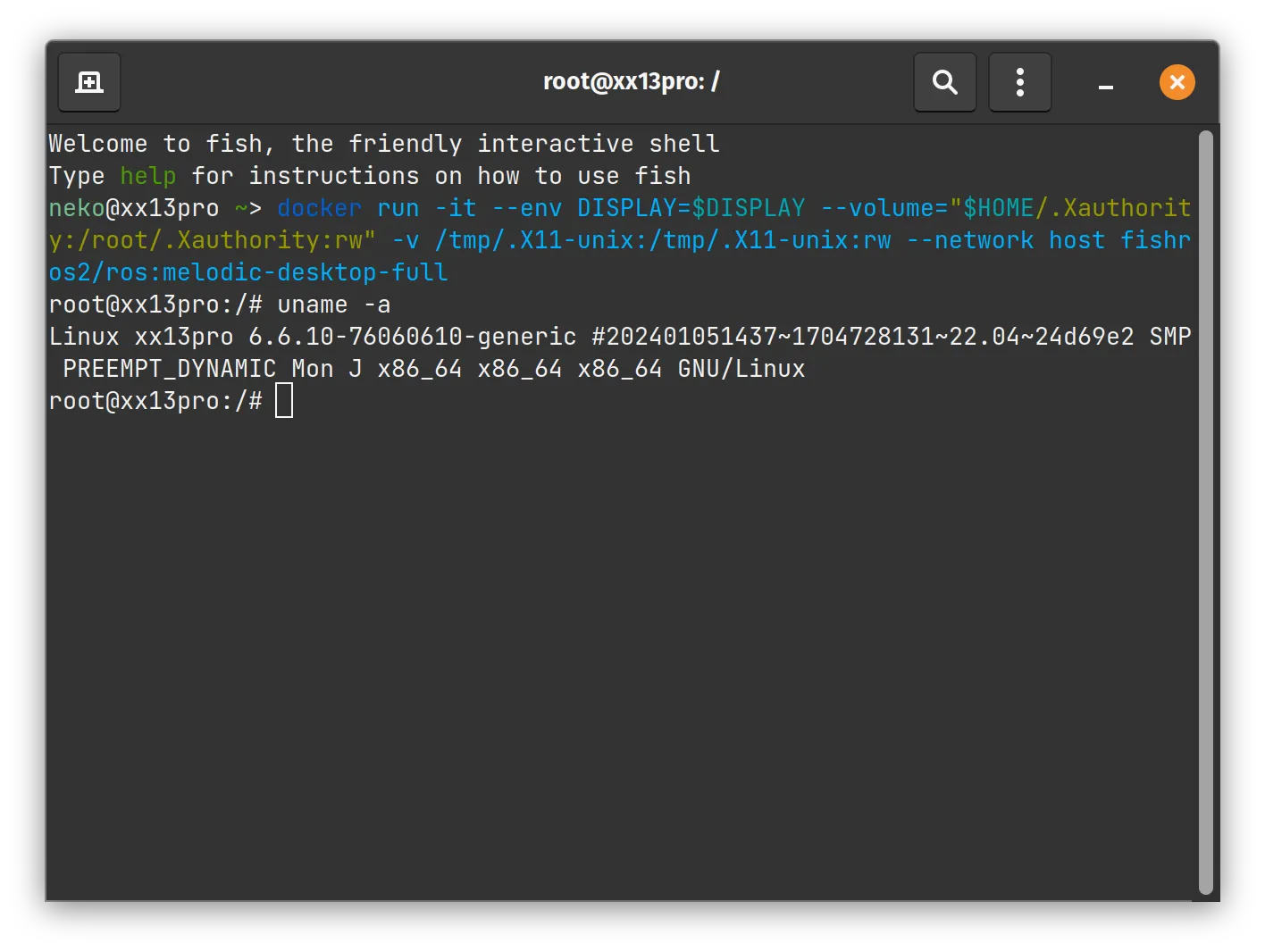
docker run -it --env DISPLAY=$DISPLAY --volume="$HOME/.Xauthority:/root/.Xauthority:rw" -v /tmp/.X11-unix:/tmp/.X11-unix:rw --network host fishros2/ros:melodic-desktop-full执行以上命令,待完成后则默认进入 docker 环境。
配置 X11 权限
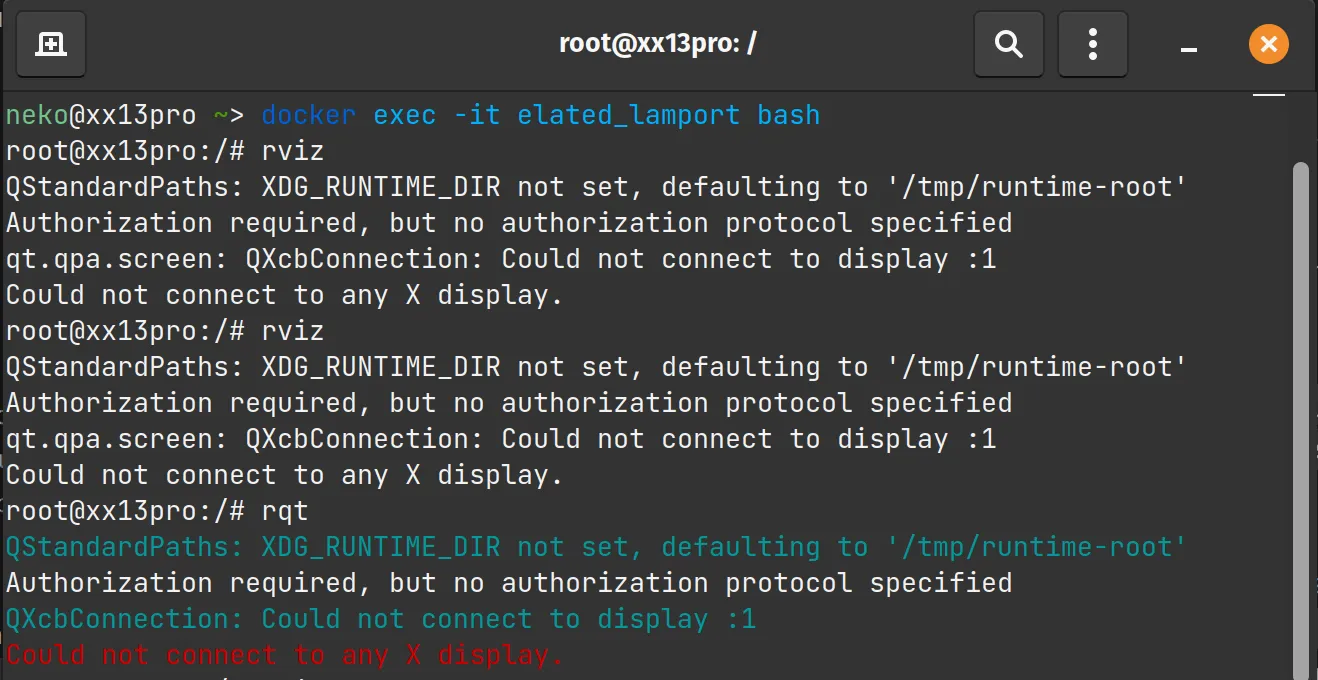
X11 窗口系统默认下采用的安全配置不允许来自 docker 的窗口连接,尝试在 docker 中运行 gui 程序会直接报错。
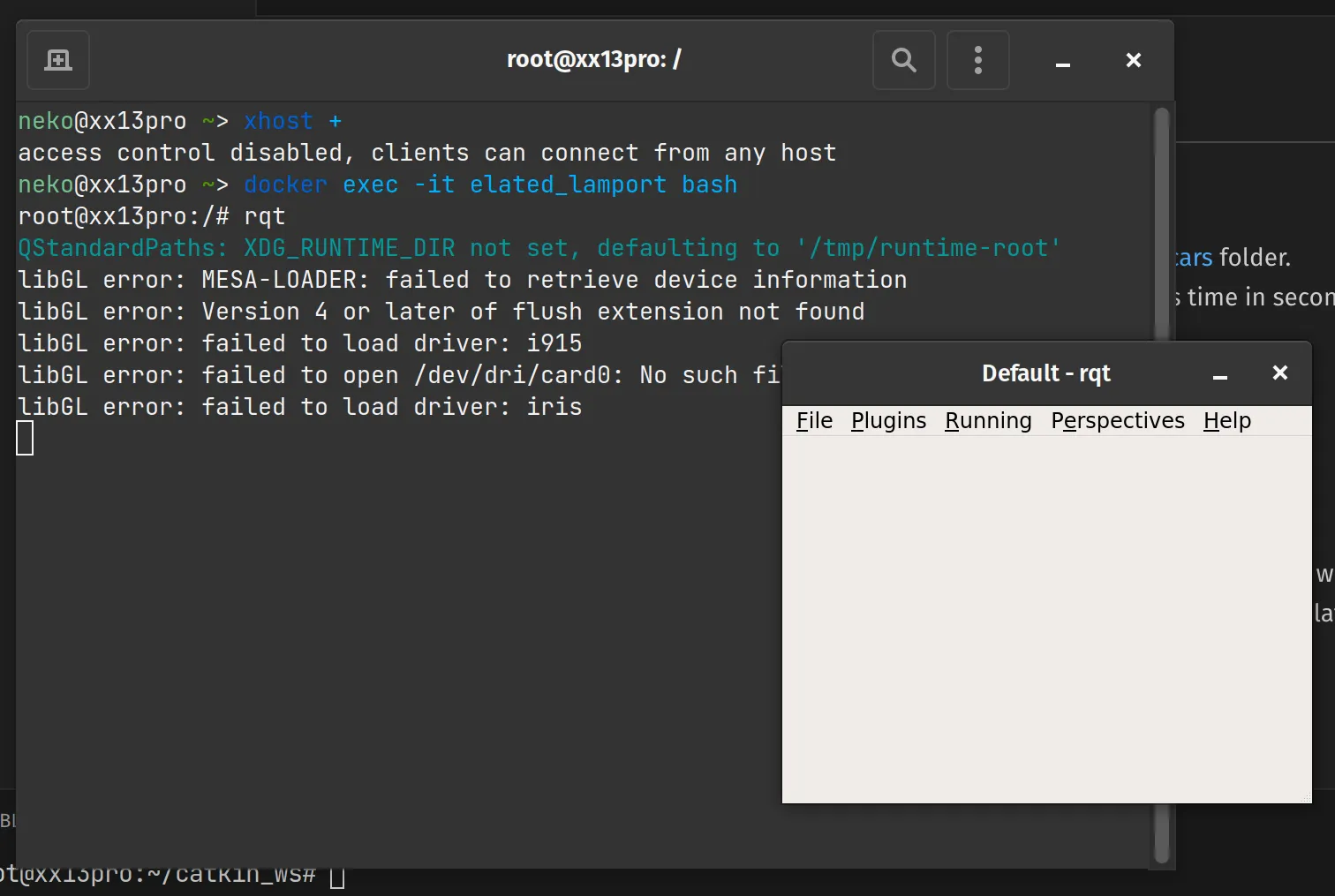
因此要在本地终端中执行: xhost + 从而允许所有的连接。
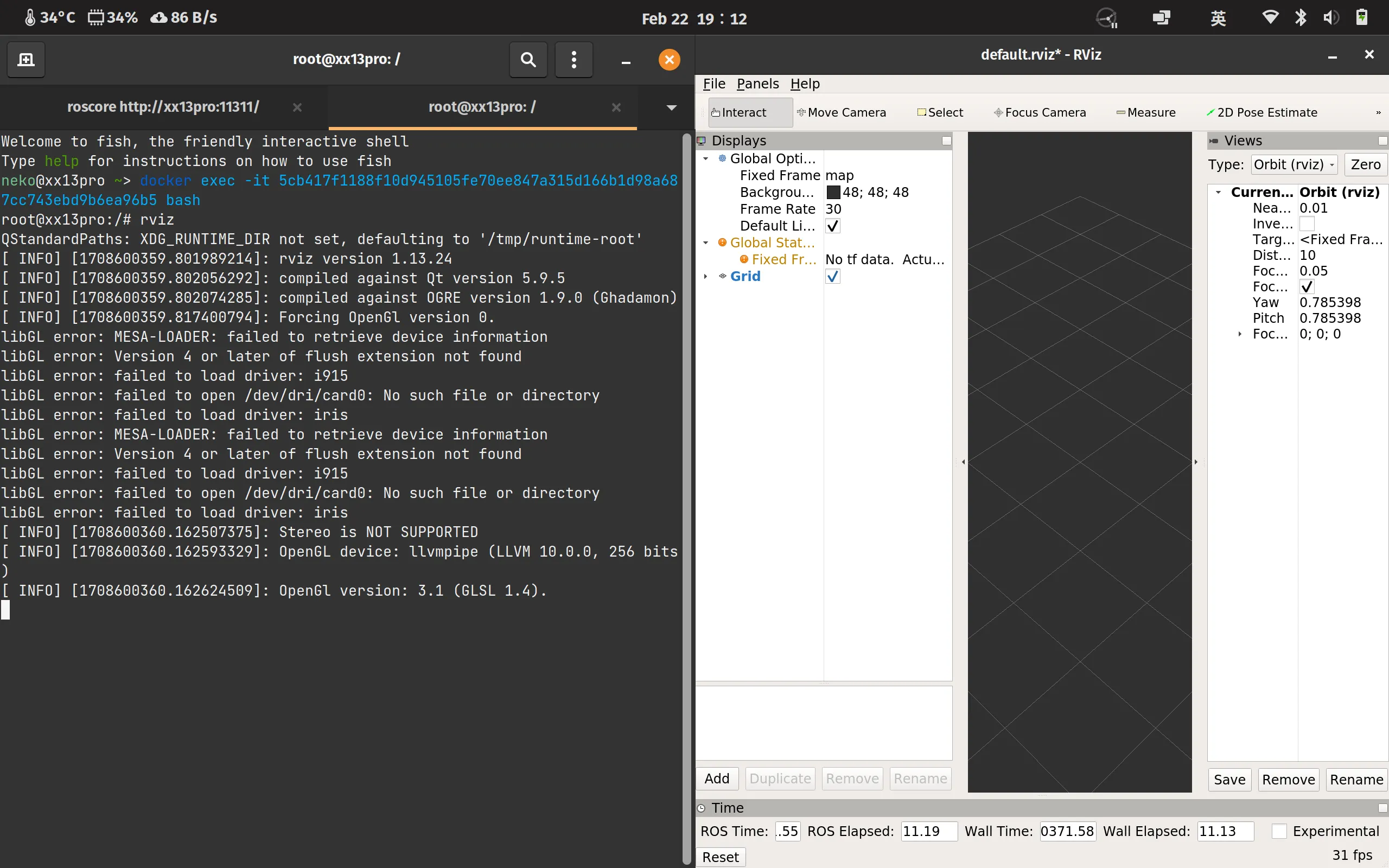
然后回到在 docker 内的终端,并尝试执行 rqt, gazebo 或者 rviz(需要先启动 roscore) 指令来查看 gui 支持是否正常。
提示
其他的 docker 命令及教程见此